近日,我院机器人系王乾乾教授团队在微机器人集群智能操控方向取得重要进展,相关研究成果以“Autonomous Navigation of Intelligent Microrobotic Swarms in Unknown Environments”为题,发表在国际顶级期刊Nature Machine Intelligence上(论文链接:https://www.nature.com/articles/s42256-026-01252-6)。该论文由东南大学唯一单位完成,是东南大学首次以独立通讯单位在该期刊发表研究论文(图1)。
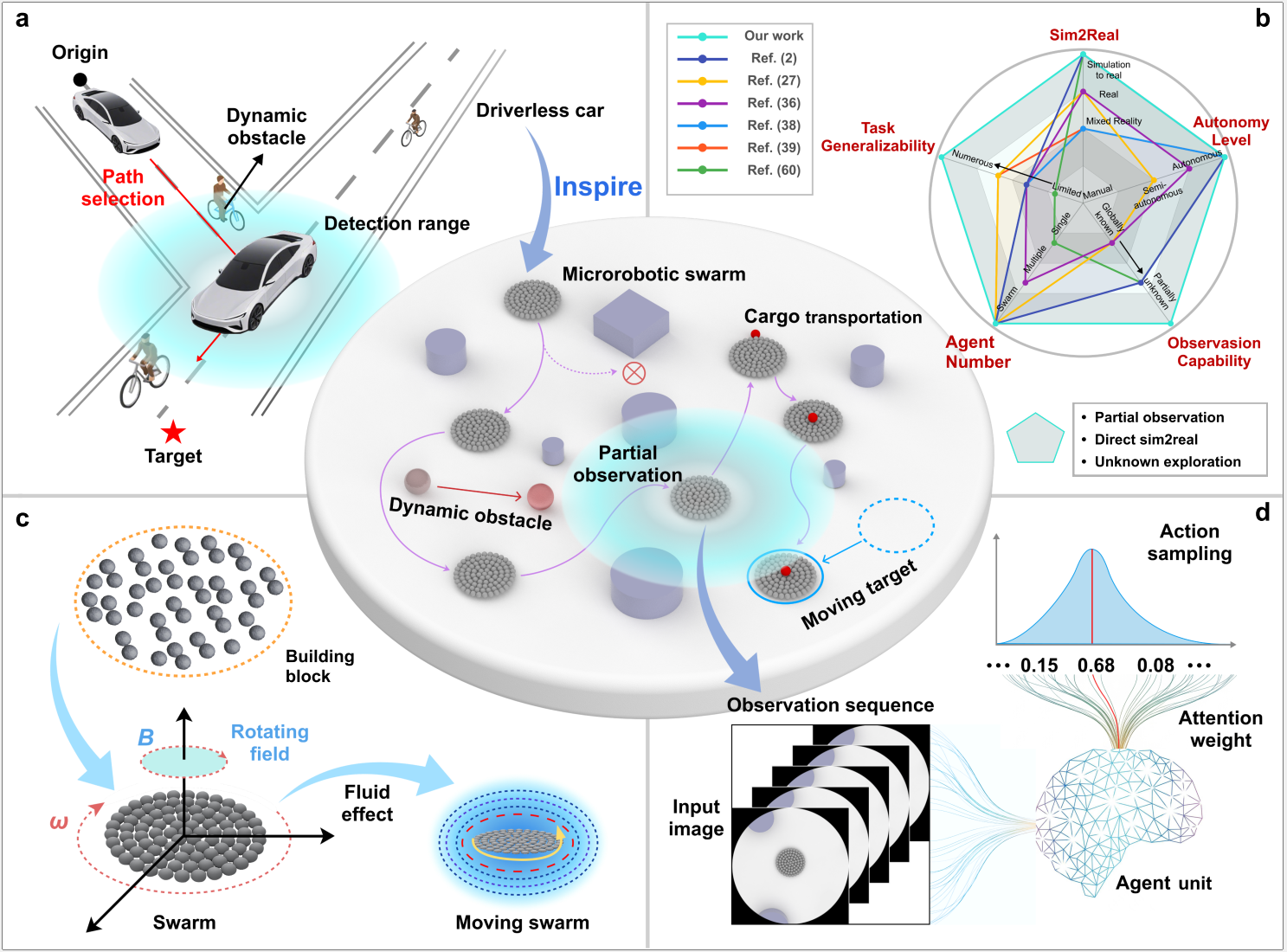
图1.面向未知环境的智能微机器人集群自主导航与避障框架
团队在前期工作中,提出了影像引导下磁性微集群在血管环境中的实时导航方法和在活体血管网络中的主动递送策略(Q. Wanget al.,Science Advances, 2021, 7, eabe5914;Science Robotics, 2024,9,eadh1978),逐步解决了“看得见、跟得上、导得准”的系列关键问题,在国际上首次验证了微集群在复杂血流、
杂血管系统内的长距离导航能力。然而,前期工作中的导航与递送过程仍较依赖操作者经验、预设路径和外部反馈调节,面对未知障碍、动态目标和局部信息缺失时,微集群尚缺乏类似宏观智能机器人的自主理解环境并实时决策的能力。如何将微集群从“可追踪、可操控”进一步推进到“能感知、会决策、可自主避障”,是微集群走向复杂生物医学应用必须跨越的关键问题。
针对这一瓶颈,本研究提出了名为Turbo的智能控制框架,将强化学习、时序扩展注意力机制和系统化域随机化相结合,使微机器人集群能够在局部观测条件下综合历史信息、目标位置与障碍物状态,实时生成导航决策。不同于传统依赖全局路径规划或人工经验调节的控制方法,Turbo在随机化仿真环境中学习策略,并通过Sim-to-Real迁移直接部署到真实微集群实验中,使集群在未知环境中具备自主探索、动态避障和任务优先级权衡能力。Turbo可在静态与动态障碍物环境中完成路径跟踪、避障导航、悬停、货物运输和移动目标跟踪等任务;在短时视觉丢失和环境扰动下,系统仍能维持导航能力,体现出良好的鲁棒性和任务泛化能力(图2)。该研究还通过注意力权重分析揭示了模型的可解释决策过程。结果显示,Turbo在学习过程中逐步从“寻找目标”过渡到“规避障碍”,最终形成对导航效率与安全避障的动态平衡;在真实动态避障实验中,模型能够对近处动态障碍、远处关键静态障碍以及历史运动状态赋予不同权重,从而实现对未知环境的连续理解和实时决策。该机制为微集群引入了“自主感知—智能决策—稳定执行”的闭环能力。
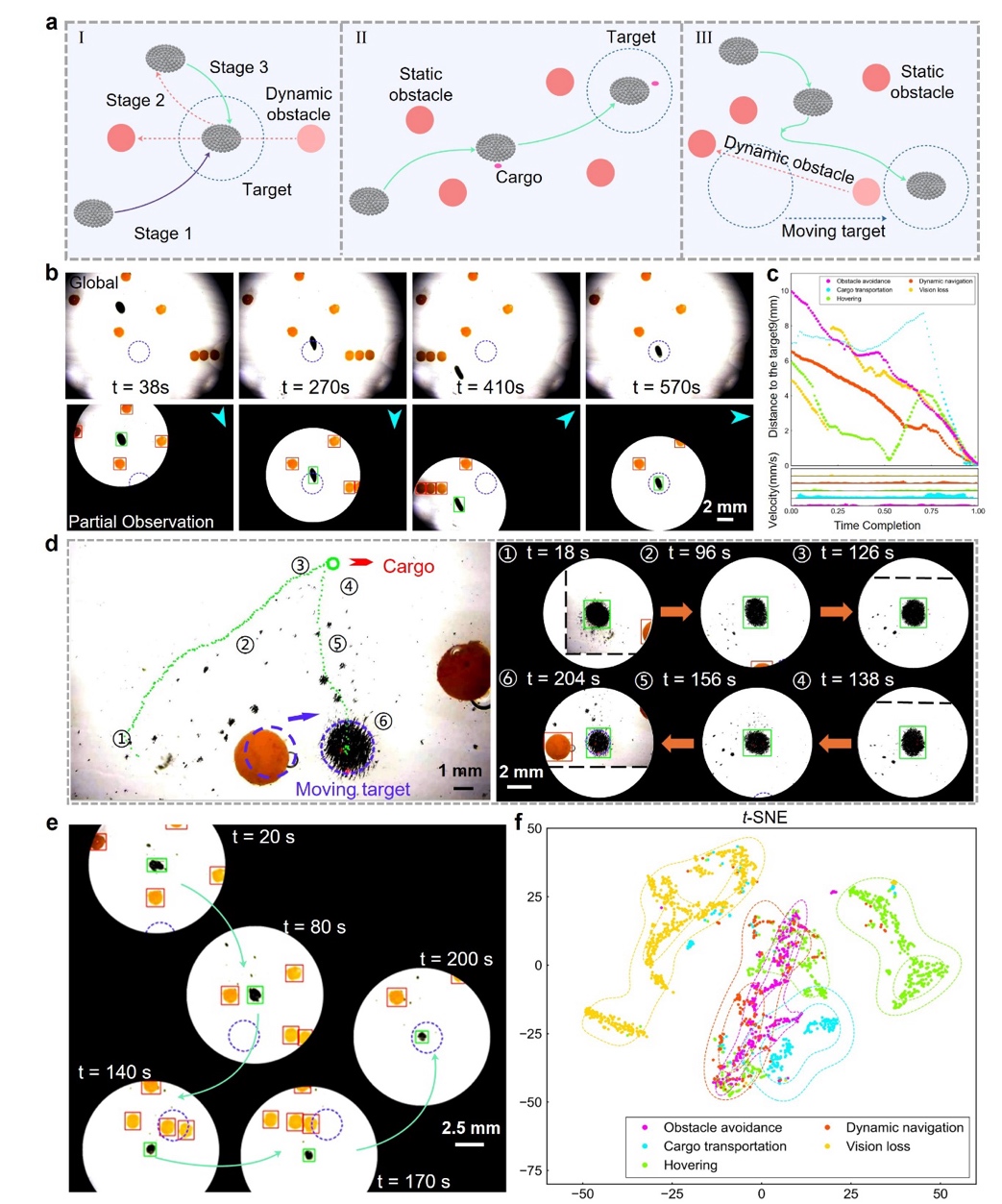
图2. Turbo支持微机器人集群完成悬停、货物运输和移动目标跟踪等复杂任务
作为团队在微集群方向的延续性成果,本研究重点从人工辅助下的可控导航拓展到未知环境中的自主智能操控。该成果不仅提升了微集群智能与自动化程度,也为未来面向血管介入、靶向递送等生物医学场景的自主微机器人系统提供了新的技术路径。相关成果已依托我校“大医科”平台开展新型医工交叉机器人系统的搭建和转化工作。
永乐高70net王乾乾教授为该论文唯一通讯作者,学院在读研究生安宣谕、罗盛铭、张皓宇为论文共同第一作者。永乐高70net、江苏省精准医学装备设计与制造重点实验室为论文完成单位。该论文得到了国家自然科学基金、江苏省自然科学基金等项目的资助。
供稿:安宣谕 王乾乾
审核:刘晓军